
辉羲智能团队获CVPR 2023自动驾驶在线高精地图构建挑战赛季军
发表时间: 2023-06-28 10:53:09

近日,国际计算机视觉顶会CVPR 2023自动驾驶国际挑战赛结果揭晓。辉羲智能从国内外众多参赛队伍中脱颖而出,获得在线高精地图构建赛道的全球季军,标志着辉羲在轻地图城区辅助驾驶技术突破中取得领先成绩。
自动驾驶技术发展迅速,对于尖端算法的要求也迈入新阶段,未来自动驾驶算法发展有赖于感知与决策的紧密结合。CVPR 2023自动驾驶国际挑战赛旨在深入探讨自动驾驶感知决策系统面临的复杂任务和挑战,共设置四大创新赛道,吸引了来自中国、美国、英国等15个国家和地区超过270个一流团队参赛。
作为国际计算机视觉与模式识别领域的三大顶级会议之一,CVPR的专业性、权威性和高含金量广受认可。据官方透露,CVPR今年共接收论文9155篇,创下历史新高,最终录用论文2360篇,接收率为25.78%。
辉羲智能 | 上海交大 CVPR 2023 挑战赛论文分享
对于自动驾驶系统,准确感知道路中车道线、路沿和人行横道等地图元素十分重要。借助这些地图元素,可以进行建图和定位,继而进行决策规划等下游任务。在L4级自动驾驶系统中,通常使用基于SLAM的方法离线构建高精地图,在线阶段仅做定位。但高精地图的成本高昂,且地图鲜度难以保证。针对以上两个痛点,近年来在线地图构建受到学术界和工业界越来越多的关注,在辅助驾驶领域形成了“重感知、轻地图”的趋势。轻地图方案的难点在于准确的在线地图感知,然后结合标精地图,最终实现在线构建高精地图。早期的工作使用栅格化的方式在线构建地图,但栅格化地图缺乏实例信息且很难确保空间一致性。近年来出现了一些更加紧凑的矢量化地图表征方法。
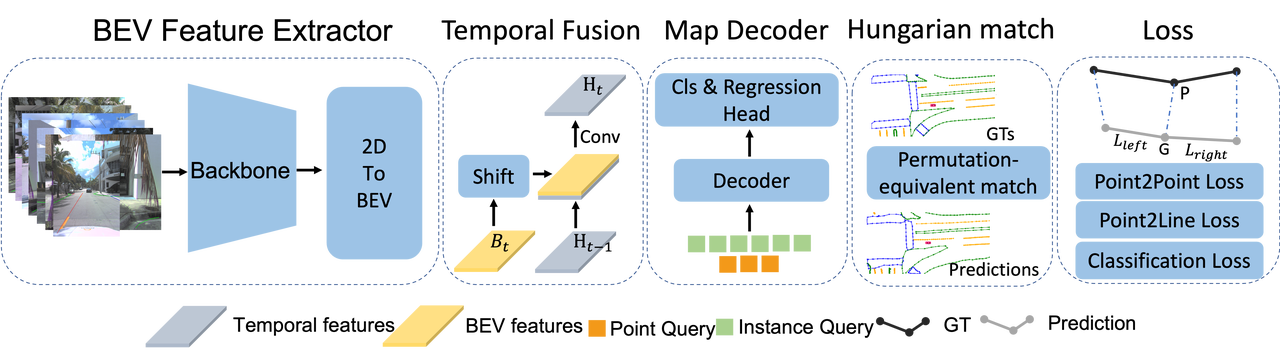
辉羲与上海交大联合开发了基于矢量化地图表征的道路结构检测网络。该网络将原始高清地图数据采样为离散的点序列,并以端到端的方式将在线高精地图构建任务定义为BEV空间中的点检测任务。在这一过程中,采用排列等价的方式对采样后的真值点与预测点进行匈牙利匹配。基于对矢量化地图表征的深入研究,团队引入了更有力的监督方案,不仅基于匹配点与预测点计算损失(Point2Point Loss),且基于与匹配点连接的线与预测点计算损失(Point2Line Loss)。在此基础之上,采用了更强大的的预训练模型、视角变换方法以及时序特征模块。此外,还引入更有效的数据增强与模型集成方案,最终以73.39% mAP 的成绩赢得季军。
辉羲智能在自动驾驶算法领域的技术积累,为轻地图的量产方案提供坚实基础。在BEV+Transformer的行业趋势下,辉羲推出融合高性能智能驾驶芯片和先进BEV架构的AD整体解决方案,采用轻地图替代高精地图的方式实现城市NOA,助力自动驾驶在更广泛的城市交通场景中实现低成本、高效率、规模化落地。
辉羲智能定位地图负责人表示:“精准高效感知是轻地图方案大规模商业化的起点和基础,为更安全的智能驾驶铺平道路。辉羲和上海交大的此项合作,是'数据闭环定义芯片'技术理念在前沿创新与产业应用的碰撞结晶,我们会不断深耕与突破,持续为客户创造价值。”
面向未来,智能驾驶的新挑战和新课题需要产学研各界集聚智慧、合作共创。辉羲注重技术创新并契合市场需求,坚持用创新计算平台服务智慧出行,同时以开放共创的态度,携手客户和合作伙伴构建高阶智能驾驶系统的软硬件生态,推动产业智慧升级。

点击右上角
分享给朋友吧







 长按图片保存/分享
长按图片保存/分享
1


Copyright © 2023 辉羲智能 版权所有 京ICP备2023002994号-1
